MQTT通讯协议
MQTT(消息队列遥测传输)是一种开放式OASIS和ISO标准的轻量级发布订阅网络协议,可在设备之间传输消息,是当下使用广泛的物联网通信协议之一。
IBM公司开发了MQTT协议的第一个版本, 设计思想是轻巧、开放、简单、规范,易于实现。
这些特点使得它对很多场景来说都是很好的选择,特别是对于受限的环境如机器与机器的通信(M2M)以及物联网环境(IoT)。
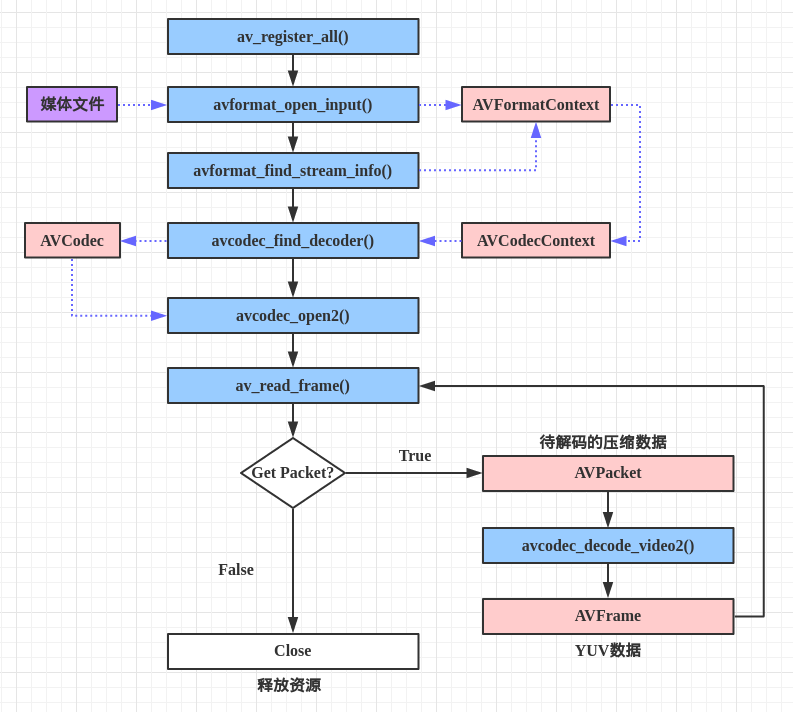
图中包括了MQTT协议中的两个角色和基本的订阅和发布模式
broker/client
broker为代理端也就是我们要搭建的服务器,client也就是每个终端温度传感器或者是电脑笔记本等
发布/订阅
手机或者电脑client向broker订阅一个temp topic,当温度传感器client发布一个temp topic则手机或者电脑同时可以接收到订阅的内容
搭建mqtt Broker
mqtt Broker使用aedes进行搭建
1 | const aedes = require('aedes')() |
测试mqtt Broker
搭建两个客户端进行模拟,每隔一秒发送一次temp。客户端使用mqtt.js
- client_pub.js
1
2
3
4
5
6
7
8
9
10
11var mqtt = require("mqtt")
var client = mqtt.connect("mqtt://localhost:18080")
// 连接后不断发布temp topic
client.on("connect", (e) => {
console.log("success connect mqtt server");
setInterval(() => {
client.publish("temp", "25.6")
console.log("send it")
}, 1000)
}) - client_sub.js
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16var mqtt = require("mqtt")
var client = mqtt.connect("mqtt://localhost:18080")
// 连接后订阅temp topic
client.on('connect', (e) => {
console.log("success connect mqtt server");
client.subscribe('temp', function (err) {
console.log("subscribe temp topic")
})
})
// 监听订阅的message
client.on('message', function (topic, message) {
// message is Buffer
console.log(topic + ":\t" + message.toString())
})
启动服务后运行两个客户端得到以下结果:
- 服务器
1
server started and listening on port 18080
- 客户端
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25node mqtt-pub.js
success connect mqtt server
send it
send it
send it
send it
send it
send it
send it
send it
send it
send it
send it
node mqtt-sub.js
success connect mqtt server
subscribe temp topic
temp: 25.6
temp: 25.6
temp: 25.6
temp: 25.6
temp: 25.6
temp: 25.6
temp: 25.6
temp: 25.6